#include <QP.h>
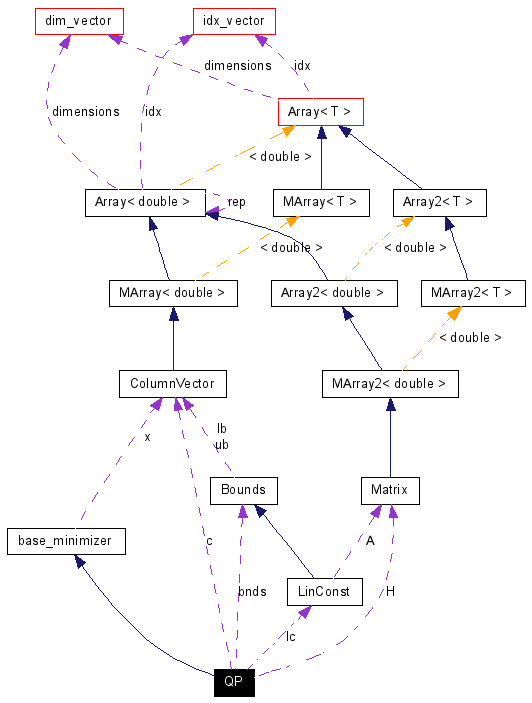
QPに対する継承グラフ
Public メソッド | |
| H () | |
| c () | |
| bnds () | |
| lc () | |
| H (H_arg) | |
| c () | |
| bnds () | |
| lc () | |
| H (H_arg) | |
| c (c_arg) | |
| bnds () | |
| lc () | |
| H (H_arg) | |
| c () | |
| bnds (b) | |
| lc () | |
| H (H_arg) | |
| c () | |
| bnds () | |
| lc (l) | |
| QP (const ColumnVector &x, const Matrix &H_arg, const ColumnVector &c_arg, const Bounds &b) | |
| QP (const ColumnVector &x, const Matrix &H_arg, const ColumnVector &c_arg, const LinConst &l) | |
| QP (const ColumnVector &x, const Matrix &H_arg, const Bounds &b, const LinConst &l) | |
| QP (const ColumnVector &x, const Matrix &H_arg, const ColumnVector &c_arg, const Bounds &b, const LinConst &l) | |
| H (qp.H) | |
| c (qp.c) | |
| bnds (qp.bnds) | |
| lc (qp.lc) | |
| QP & | operator= (const QP &qp) |
| virtual | ~QP (void) |
| Matrix | hessian (void) const |
| ColumnVector | linear_obj_coeff (void) const |
| Bounds | bounds (void) const |
| LinConst | linear_constraints (void) const |
Public 変数 | |
| __pad0__: base_minimizer () | |
| __pad1__: base_minimizer (x) | |
| __pad2__: base_minimizer (x) | |
| __pad3__: base_minimizer (x) | |
| __pad4__: base_minimizer (x) | |
| __pad5__: base_minimizer (qp) | |
Protected 変数 | |
| Matrix | H |
| ColumnVector | c |
| Bounds | bnds |
| LinConst | lc |
|
||||||||||||||||||||
|
|
|
||||||||||||||||||||
|
参照 bnds, c, H, lc, と base_minimizer::x. |
|
||||||||||||||||||||
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
参照 bnds. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
参照 H. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
参照 lc. |
|
|
参照 c. |
|
|
参照 bnds, c, H, lc, と base_minimizer::operator=(). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
呼出 bounds(), lc(), operator=(), と QP(). |
|
|
呼出 lc(), linear_obj_coeff(), operator=(), と QP(). |
|
|
呼出 hessian(), lc(), operator=(), と QP(). |
|
|
呼出 lc(), linear_constraints(), operator=(), と QP(). |
 1.2.18
1.2.18
| SEO | [PR] 爆速!無料ブログ 無料ホームページ開設 無料ライブ放送 | ||
